上QQ阅读APP看书,第一时间看更新
第二节 时滞非线性半车悬架模型
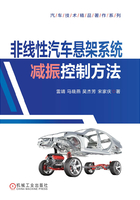
考虑具有控制时滞和测量时滞的非线性四自由度半车悬架系统如图3.2所示。

图3.2 具有时滞的半车主动悬架系统
其运动方程为

式中,I为车身转动惯量;ms为簧载质量;xc(t)、φ(t)分别为簧载质量质心垂直位移和纵倾角;设i=f,r分别代表前轮和后轮,则k1i和k2i分别为线性和非线性悬架刚度;bi为悬架阻尼;kti为轮胎刚度;li为车身质心距轴线的距离;mui为非簧载质量;xsi(t)为簧载质量的垂直位移;xui(t)为非簧载质量的垂直位移;xri(t)为路面激励输入;ui(t)为主动控制力输入;τ>0,为控制时滞;σ>0,为测量时滞。定义状态向量

控制输入向量u(t)=[uf(t),ur(t)]T,扰动输入向量v(t)= 。评价悬架系统性能的指标为乘坐舒适性、动行程和接地性。对于半车模型,乘坐舒适性指车身的振动情况,通过车身质心垂直振动加速度
。评价悬架系统性能的指标为乘坐舒适性、动行程和接地性。对于半车模型,乘坐舒适性指车身的振动情况,通过车身质心垂直振动加速度 、纵倾角的加速度
、纵倾角的加速度 来评价;动行程指悬架系统的组成元件(如弹簧、减振器)的压缩和拉伸长度,评价指标为悬架动挠度xsi(t)-xui(t)(i=f,r);接地性对车辆的操纵稳定性和安全性影响很大,评价指标是车轮的动变形xui(t)-xri(t)(i=f,r)。为了使悬架的各项性能指标达到最佳状态,选择控制输出向量为
来评价;动行程指悬架系统的组成元件(如弹簧、减振器)的压缩和拉伸长度,评价指标为悬架动挠度xsi(t)-xui(t)(i=f,r);接地性对车辆的操纵稳定性和安全性影响很大,评价指标是车轮的动变形xui(t)-xri(t)(i=f,r)。为了使悬架的各项性能指标达到最佳状态,选择控制输出向量为

由于动挠度和车身速度可用传感器测量得到,取测量输出为

根据运动方程(3.3)及如下关系式

得到系统的状态空间表达式

其中,α(t)为已知的初始函数,A∈R8×8,B∈R8×2,C1∈R4×8,C2∈R6×8,D∈R8×2,E∈R6×2和f(x)为
